
1、Finished welded body in white, transported to the inspection platform, in place
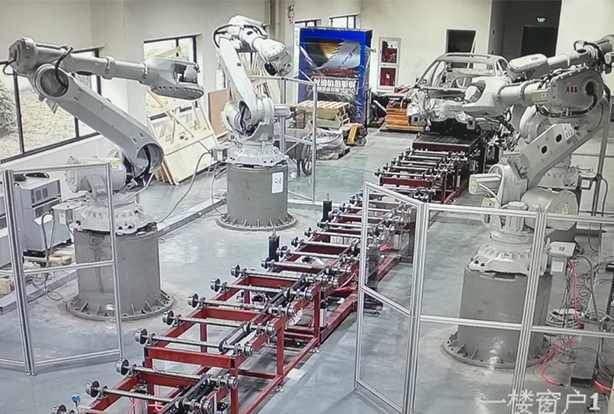
2、At this time, the 4-arm robot controlled by PLC enters the working mode at the same time
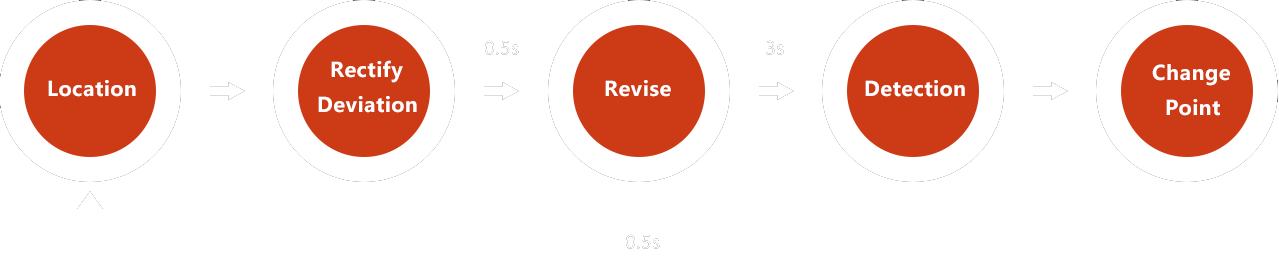
3、After the solder joint position teaching robot, according to the user set the solder joint quickly position
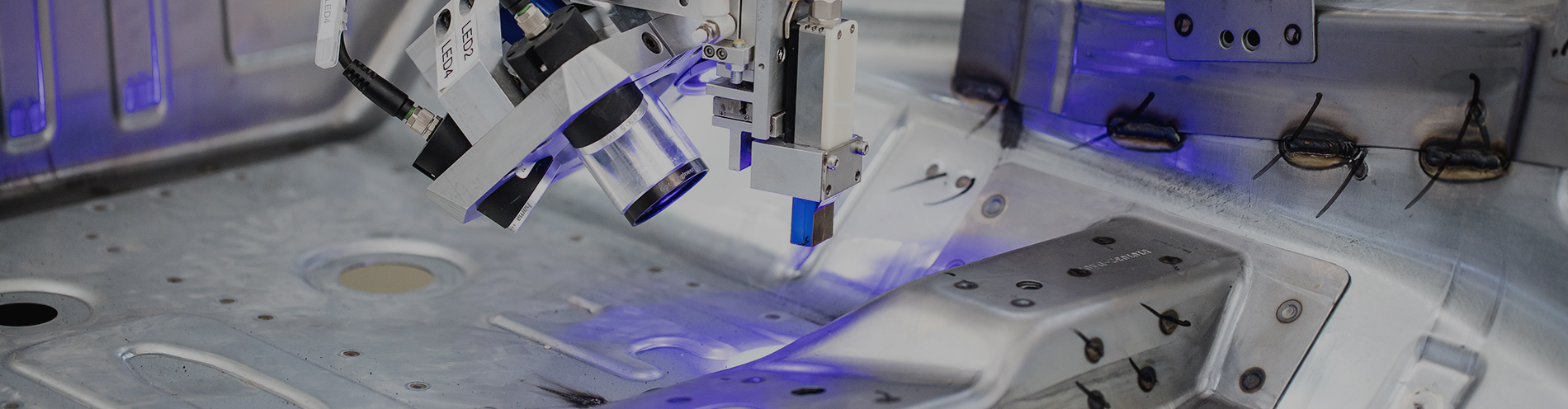
4、The PLC activates the vision device located on the front detection module of the robot
5、The visual device checks the position of the target solder joint, and transmits the position signal after the check to the robot
6、The robot sends the probe mounted on the most front end of the inspection module to the target solder joint 40mm
7、The probe, driven by compressed air, accurately locates the target solder joint
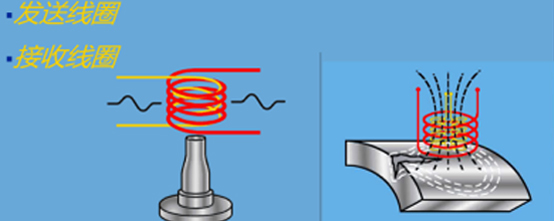
8、The vortex coil on the probe detects the weld core and sends the signal back to the controller located on the robot
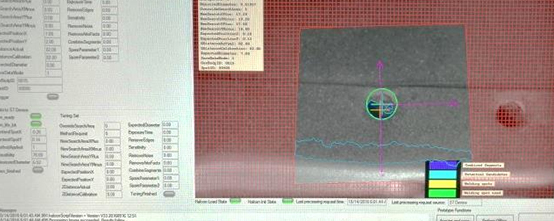
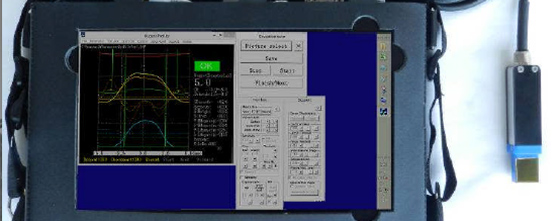
9、After analyzing and calculating the detection signal by the controller, the detection results are fed back to the PLC in the form of numbers and curves
10、The PLC forms the inspection report and feeds the results back to the welding system

Robot visual guidance
The pictures taken by the on-site camera guide the robot to operate automatically.

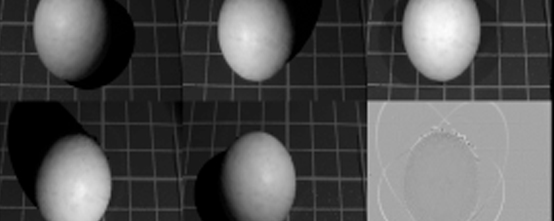
Principles of visual 3D measurement
The shape of solder joint is fitted with structured light

Principle of eddy current testing
Refer to the product description on this website


Fast and accurate detection speed ---- 5 seconds/dot;
On-line welding joint quality control;
Excluding the influence of human factors;
Solder joint quality data, can monitor the stability of the welding and the actual state;
The bad solder joints can be identified, which is convenient for future quality tracing;
Reduce personnel costs and inspection costs;
The quality standard of the solder joint is set by the user.