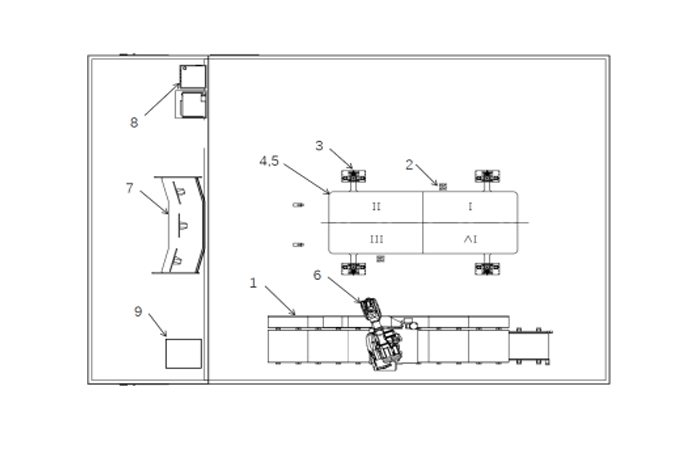
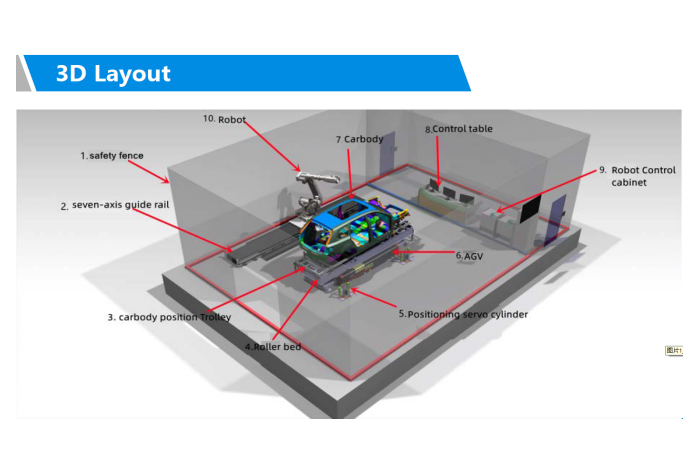
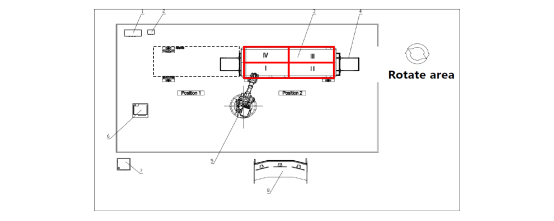
1. 7-axis of robot
2. RFID position/ QR codePosition
3. positioning by electric cylinder
4. carbody
5. AGV+roller bed
6. Robot
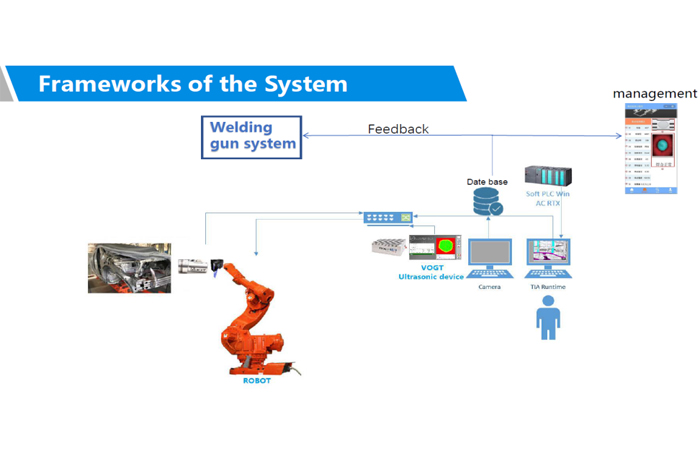
7. Control system
8. Robot control cabinet
9. Electrical control cabinet
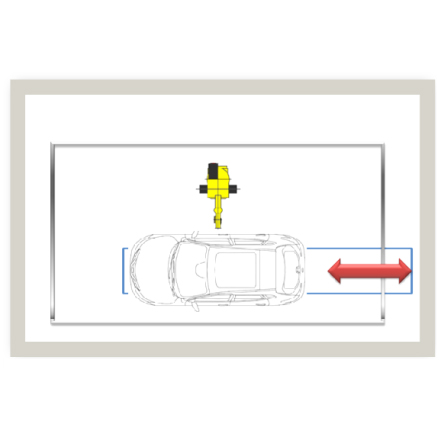
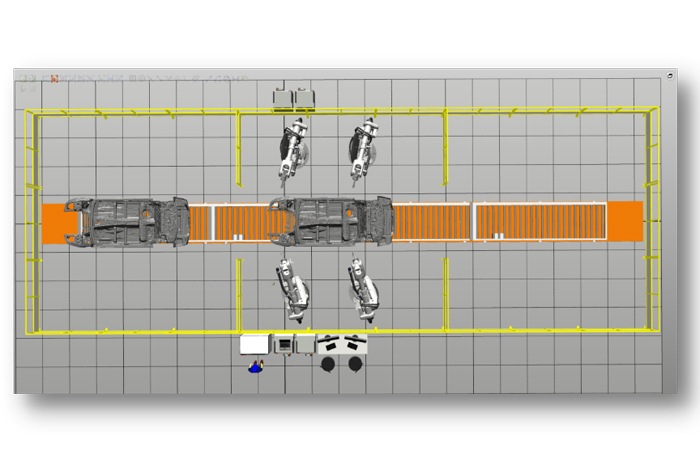
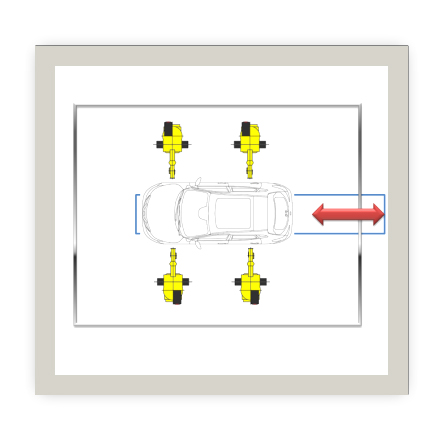
• As shown in the figure, the carbody is divided into four parts. Robots with measuring devices can physically cover this area.
• 3D carbody filesmust be provided. In order to calculate the reachability of each welding spot by computer simulation.
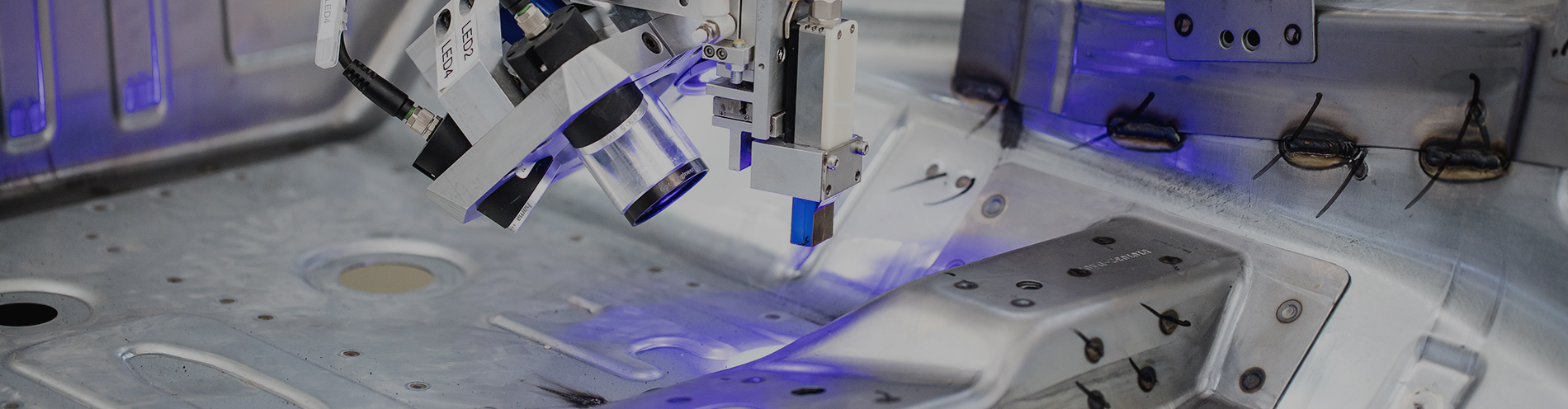
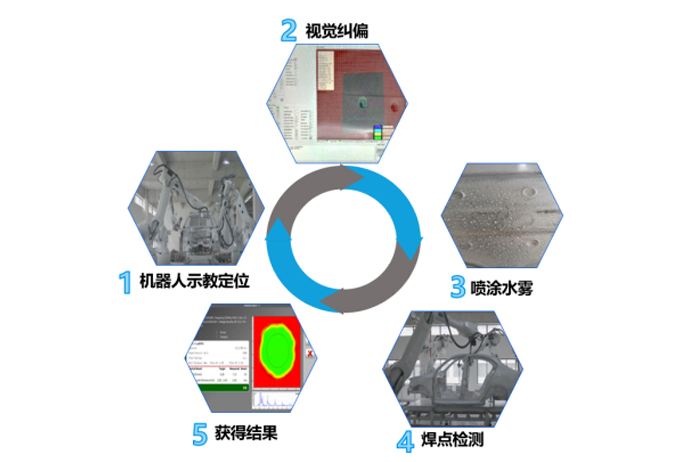
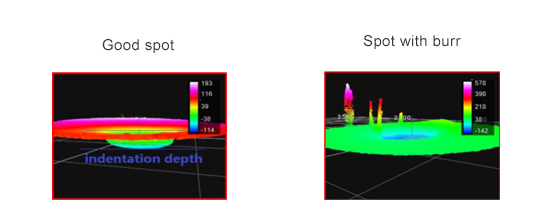
• Position and appearance detection
• Visual appearance inspection
1.As shown in the figure, the carbody is divided into four parts. Robots with measuring devices can physically cover this area.
2.3D carbody filesmust be provided. In order to calculate the reachability of each welding spot by computer simulation.
Position and appearance detection
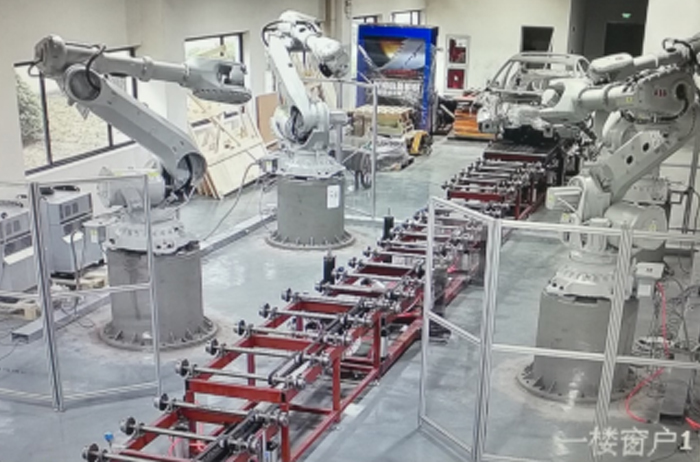
• 4 Robot to complete 250 solder joint inspection takes only 5 minutes
• The cost of manpower and consumables is greatly saved
• The result of automatic solder joint inspection is more stable than that of manual inspection.
• It can realize the detection of the welding spot of the body
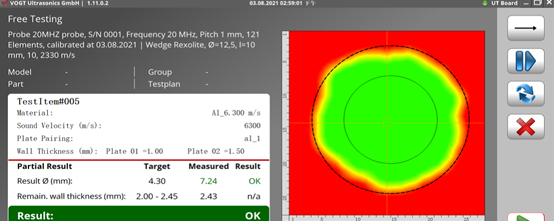
• Ultrasonic phased array equipment is adopted.
• Research and application of various visual means and core algorithms
• It has the function of timely feedback to the welding production of the body and the replacement of the electrode cap.
• Improve the quality traceability of spot welding.
* The coupling agent coupling can be replaced by water coupling in automatic detection