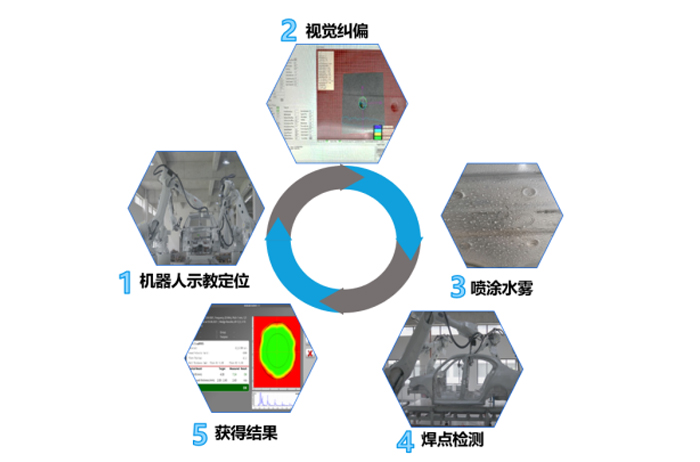
1. 机器人示教定位
2. 视觉纠偏
3. 喷涂水雾
4. 焊点检测
5. 获得结果
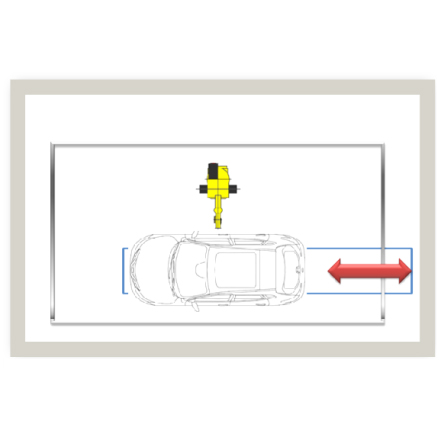
检测选项 • 最多检测20个点在100秒时间 • 主要面向检测单件或部分车身检测客户 • 可在线或旁路检测,在线做为单品检测
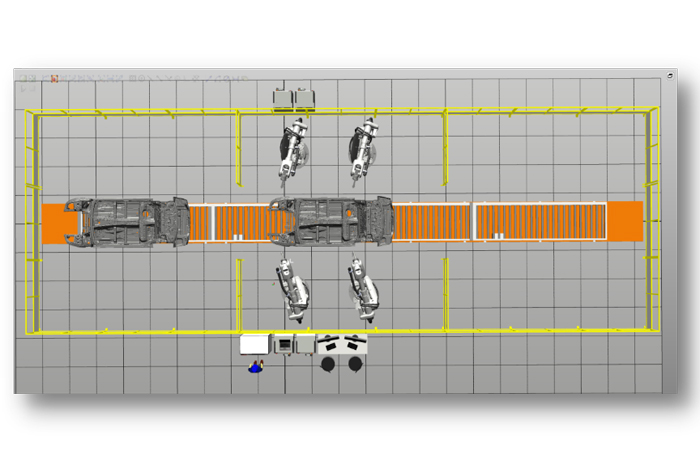
空间要求 • 最小 6m x 6m • 安全洁净生产区域 • 供电和主控柜位置和机械人控制柜位置
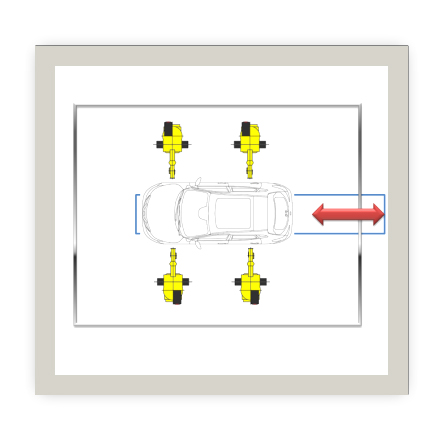
检测选项 • 最多检测80个点在100秒时间 • 可覆盖车身的90-95%部位。 • 主要面向需求车身全检的客户 • 可在线或旁路检测
空间要求 • 最小 6m x 6m • 安全洁净生产区域 • 供电和主控柜位置和机械人控制柜位置

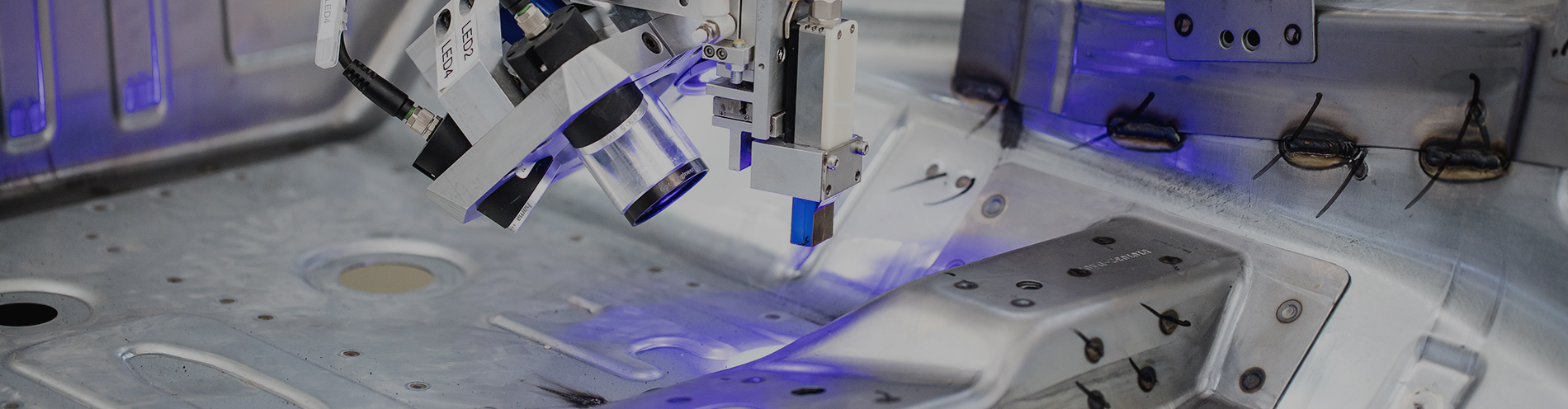
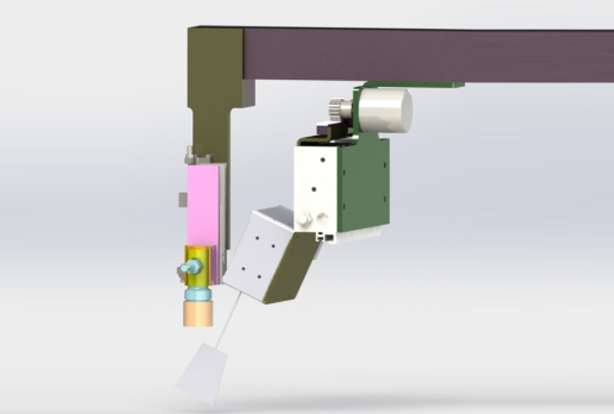
当超声波在介质中传播时,如果遇到声阻抗不同的另一种材料

超声波将发生反射,通过分析反射回波得到工件的内部信息
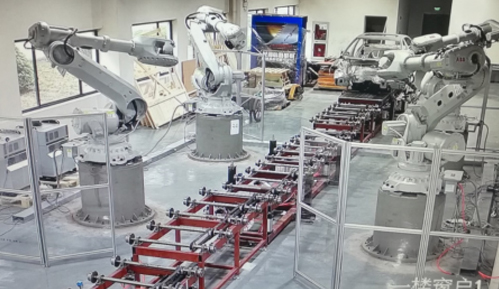
• 4机械手完成250焊点检测只需要5分钟
• 大大节省了人力和耗材成本。
• 自动化焊点检测比人工检测的结果更稳定。
• 可以实现车身焊点的检测
• 采用超声波相控阵设备。
• 多种视觉手段和核心算法的研究与应用。
• 对车身焊接生产及电极帽的更换起到及时反馈的功能。
• 完善车身点焊的质量追溯。
* 自动化检测中能用水耦合来代替耦合剂耦合